Laboratorium Posturologii
Kierownik Laboratorium
dr hab. n. o kf. Jacek Wilczyński, prof. UJK

pok. B 2.07
41 349 6933
jacek.wilczynski@ujk.edu.pl
W Laboratorium Posturologii prowadzone są badania dotyczące:
- kompleksowej i zintegrowanej oceny i analizy postawy ciała w statyce i ruchu optoelektronicznym systemem DIERS formetric 4D motion,
- składu ciała systemem Tanita i Seca,
- budowy i postawy ciała systemem Zebris,
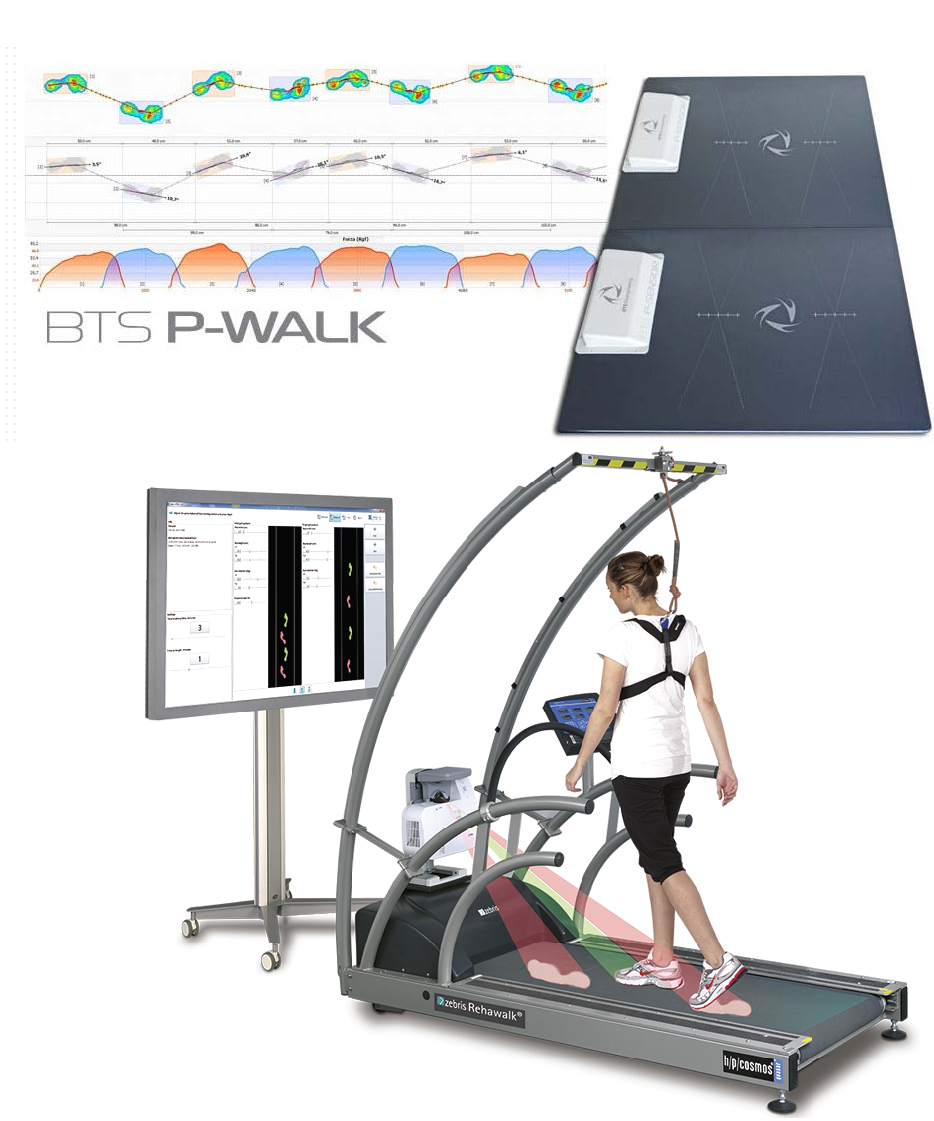
- wad stóp systemem P-Walk,
- badania i analizy chodu na bieżni Zebris,
- neurokinezjologicznej diagnostyki postawy ciała (NDT Bobath, SI, INPP),
- wad postawy ciała i skolioz w powiązaniu z reakcjami posturalnymi na platformach Amti, Biodex Balance System, Tecnobody ProKin,
- analiz widmowych reakcji postoralnych systemem Framiral Multitest Equilibre (złoty standard w diagnostyce i rehabilitacji zaburzeń posturalnych),
- wad postawy i skolioz w powiązaniu z napięciem posturalnym, mięśniowym i stabilizacją centralną (SEMG – system przewodowy i bezprzewodowy Noraxon, systemy Tergumed),
- znaczenia odruchów przedsionkowo-rdzeniowych, przedsionkowo-wzrokowych i przedsionkowo-okoruchowych w sterowaniu równowagą i stabilnością posturalną u dzieci z wadami postawy i skoliozami,
- wad postawy i skolioz w powiązaniu ze składem ciała,
- wad postawy ciała i skolioz w powiązaniu z wadami chodu,
- wad postawy ciała i skolioz w powiązaniu z wadami stóp,
- wad postawy ciała i skolioz w powiązaniu z integracją sensoryczną (SI),
- wad postawy ciała i skolioz oraz opóźnienia neurorozwojowego według INPP,
- postawy ciała i skolioz oraz opóźnienia neurorozwojowego w oparciu o test figur Tansleya i Bender Gestalt,
- postawy ciała w powiązaniu z wadami refrakcji wzroku,
- postawy ciała w powiązaniu z zaburzeniami widzenia przestrzennego,
- wad postawy ciała i skolioz w powiązaniu z EEG mózgu,
- wad postawy ciała i skolioz w powiązaniu z analizą widmową zmienności rytmu zatokowego,
- postawy ciała i skolioz w powiązaniu z napięciem nerwu błędnego (teoria poliwagalna),
- wad postawy i skolioz w powiązaniu z typem układu nerwowego, temperamentu i osobowości,
- wad postawy ciała i skolioz w powiązaniu z odpornością na stres,
- wad postawy ciała i skolioz w powiązaniu z równowagą współczulno-przywspółczulną,
- reedukacji posturalnej dzieci z wadami postawy i skoliozami na platformach Biodex Balance System, Tecnobody ProKin i Framiral Multitest Equilibre,
- zastosowania metody biofeedback w reedukacji posturalnej na platformach,
- terapii skolioz systemem FED,
- reedukacji postoralnej osób ze schorzeniami neurologicznymi przy wykorzystaniu egzoszkieletu i Robotgait,
- oceny wpływu polimorfizmów SNP wybranych genów na rozwój skolioz idiopatycznych u dzieci,
- znaczenia neuroplastyczności i neurogenezy OUN w terapii wad postawy ciała i skolioz

Rycina 1. DIERS motion LAB II Niejonizujący optoelektroniczny system diagnostyczny DIERS motion LAB II: DIERS formetric 4D motion + DIERS pedogait 1.0 + DIERS leg axis module Ap + DIERS leg axis module Right i Left.
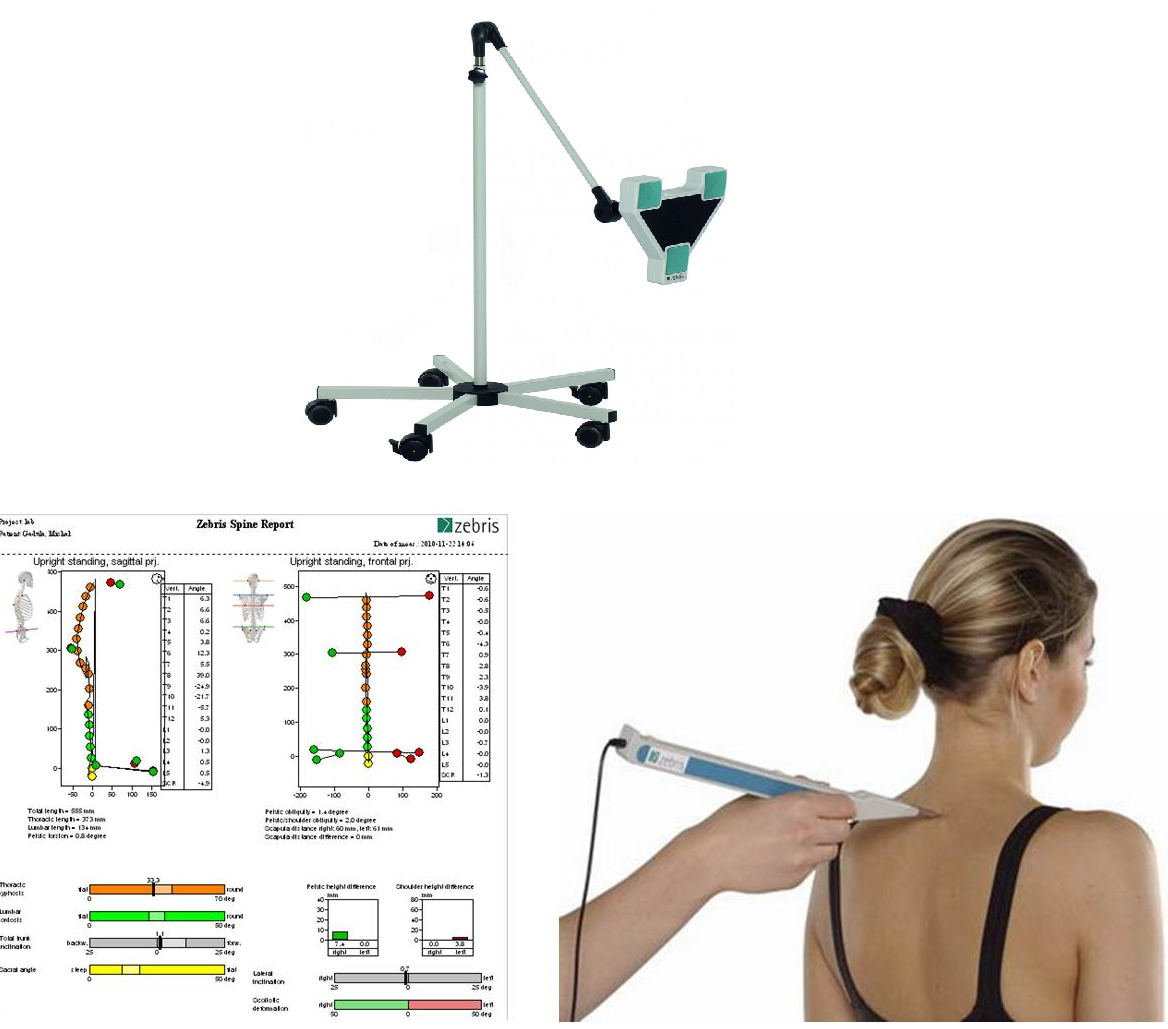
Rycina 2. Zebris THQ-M3i. Niejonizujący system oceny antropometrycznej ciała.
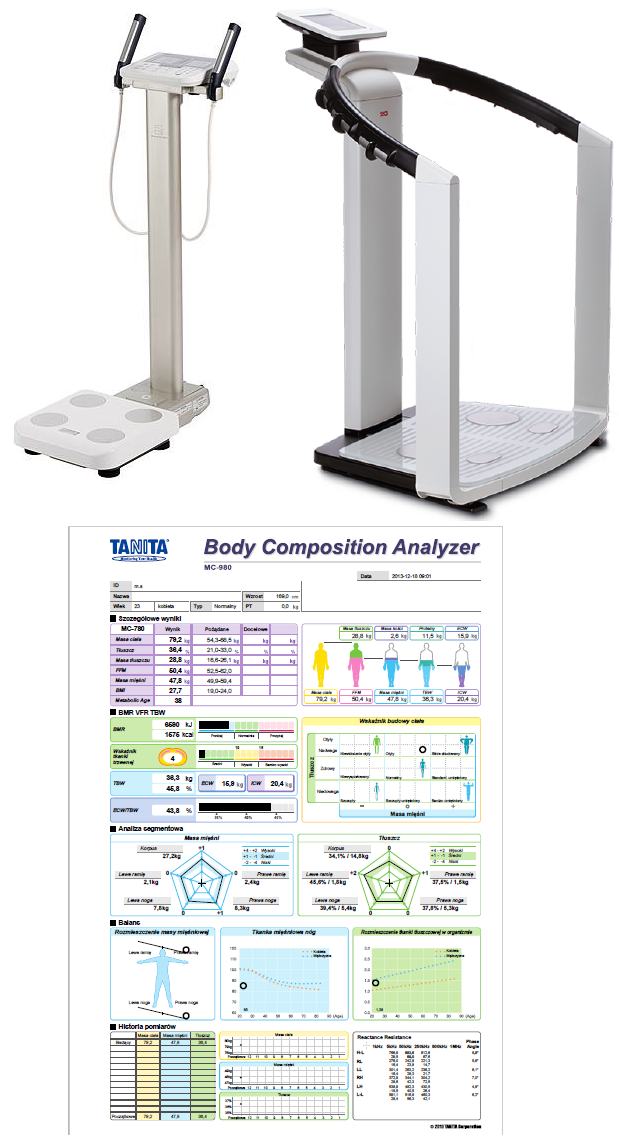
Rycina 3. Analizator składu ciała SECA mBCA 515 i Tanita (bioimpedancja elektryczna).

Rycina 5. Platforma Biodex Balance System i Tecnobody Prokin 252, diagnostyka i terapia reakcji posturalnych, równowagi ciała, biofeedback. Ocena i terapia stabilności posturalnej i równowagi.
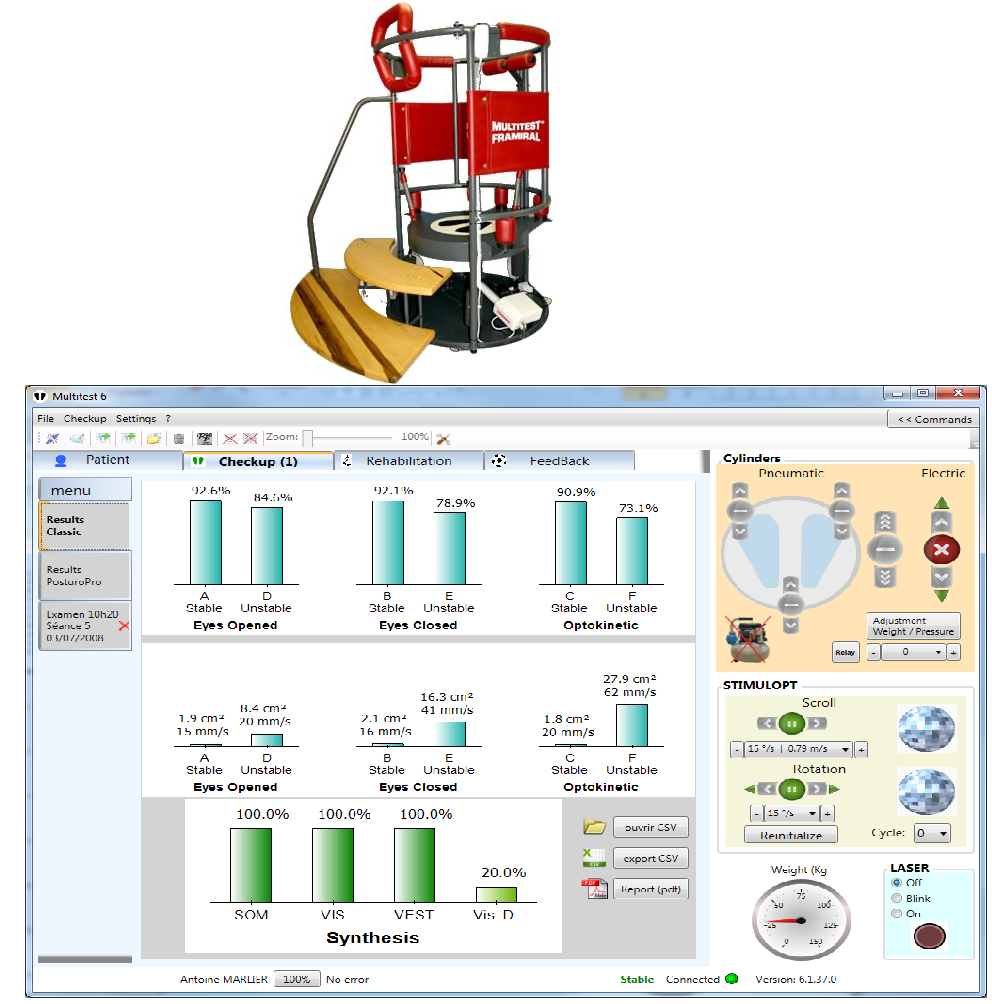
Rycina 6. Framiral Multitest Equilibre Analiza widmowych reakcji postoralnych (złoty standard w diagnostyce i rehabilitacji zaburzeń posturalnych).
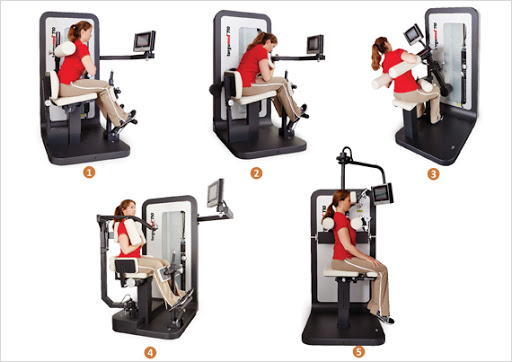


Rycina 7. Tergumed 710 i MCU BTE – zestaw do diagnostyki i terapii schorzeń kręgosłupa, wad postawy i skolioz, stabilizacja centralna, momenty sił, biofeedback wizualny.
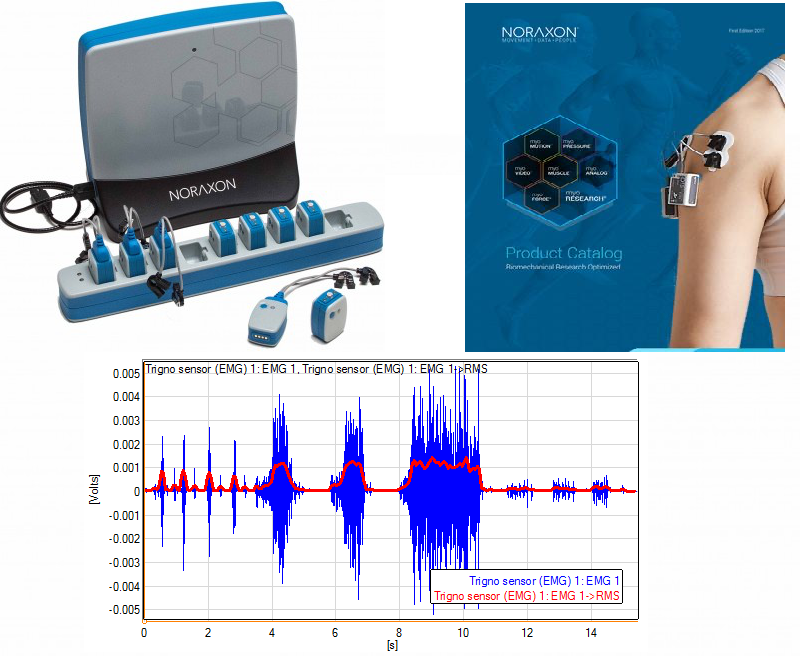
Rycina 8. Noraxon Ultium DTS 16-K MR3; zestaw do bezprzewodowej rejestracji i analizy elektromiograficznej SEMG.


Rycina 9. Biodex System 4 PRO (fotel izokinetyczny) do diagnostyki i terapii nerwowo-mięśniowej dzieci z wadami postawy i skoliozami w warunkach skurczu izometrycznego, izotonicznego (koncentrycznego, ekscentrycznego) i auksotonicznego.


Rycina 10. System do zrobotyzowanej rehabilitacji reedukacji chodu zawierający robot stacjonarny i robot mobilny.